1. 路況問題及系統規格未臻完善:目前市售的車款,AEB系統一般是透過裝在前擋風玻璃上的攝影機影像模組,與水箱前方的毫米波雷達模組,偵測到前方物體有碰撞危險時,由控制器(ECU)主動下命令啟動緊急煞車。
而ACC+AEB在國際標準規範(如:Euro NCAP、ECE R152)測試車速要求最高只到80km/h,而且結果並不保證不會撞到前車,而是以碰撞時降低的車速來計算評價分數,當然,這跟現有感知器的規格能力限制有關。所以像是許多車輛測試駛向前方靜止車輛,大半車型車速達到50~60km/h就會撞到前車,換言之高速行駛下,其實像是工程車都能偵測,可以降低撞車時的車速減少傷害,但不是避免撞車。
2. 不可抗拒的環境因素:如在寒冷與惡劣的天候下,Level 2自駕系統可能會無法運作,在下雨、下雪和水花,室外光線大幅度的變化也會影響感知器的性能,擋風玻璃上的阻礙物遮蔽感知器,系統也可能無法正常運作。因此車主手冊會提醒某些天候下,攝影機與雷達沒辦法確保偵測的正確性,將影響AEB運作。

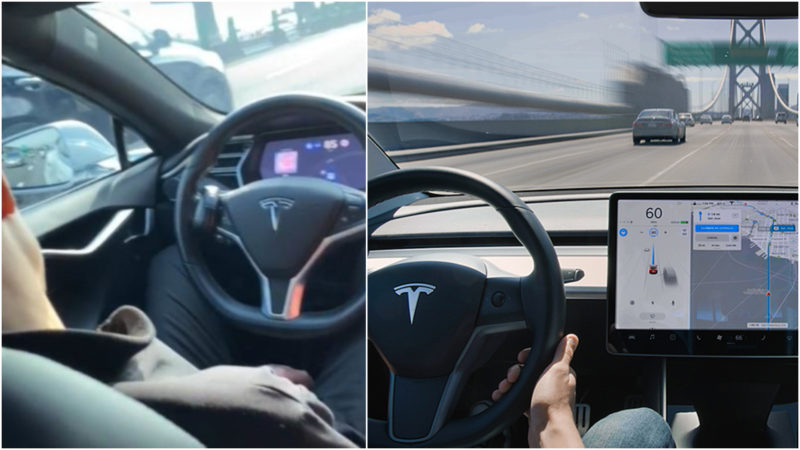
3. 原車廠設計不可自動駕駛:車輛可能配備有自動變換車道系統(LCS)的Level 2的車款,也必須由駕駛人打方向燈才可以啟動,因此駕駛人不能在高速公路上啟動ACC就完全不管路況,Level 2系統會偵測駕駛人是否握著方向盤操控車子,否則會主動取消駕駛輔助系統功能,就是這個道理。
4. 駕駛人需負擔肇責:目前市售Level 2的車款,必須由駕駛人操控駕駛,不可自動駕駛,除非是系統故障或瑕疵品造成事故,否則發生交通事故是由駕駛人來負擔肇事責任的。

在全自動駕駛車到來前,Level 2以下的駕駛輔助系統規格能力,僅是用來輔助駕駛人降低開車疲勞並提升安全性,不能取代駕駛人全自動駕駛,因為車輛無法自動閃避前車,也無法百分百避免碰撞,發生事故的責任還是駕駛人要自行負責,綜觀上述,駕駛人使用ACC還是要保持一定注意力。
ARTC工程師認為,系統開發過程應也要考慮預防駕駛人誤用,或太過依賴駕駛輔助系統的慣性疏忽而失神,可以讓系統更為完美。另外也建議在國道或快速道路上施工修剪樹枝或清掃時,工程車(防撞車)能夠保持20km/h以上的速度前進,這對ACC系統的減速防撞會很有幫助,如果是固定點施工時,能夠在車輛後方擺放三角錐,也可以有效降低高速碰撞事故發生之機率。

延伸閱讀: